kagabitシリーズ

サーボモーターの利用
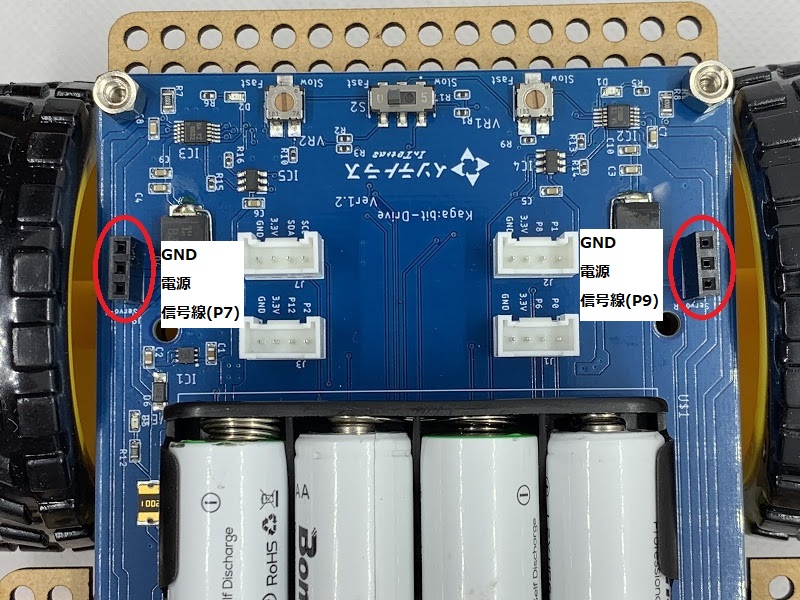
Kaga:bit-Drive前方のサーボモーター用の端子にサーボモーターを接続します。ピン配置は前方より以下のようになっています。
| 左側(Servo-L) | GND、電源(6V)、信号線(P7) |
| 右側(Servo-R) | GND、電源(6V)、信号線(P9) |
サーボモーターの接続間違いにご注意ください。
接続を間違えるとサーボモーター破損の可能性があります。
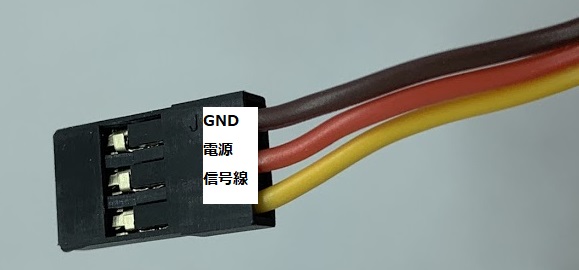
一般に下記のような配線となっています。
| GND | 茶色 |
| 電源 | 赤色 |
| 信号線 | 黄色 |
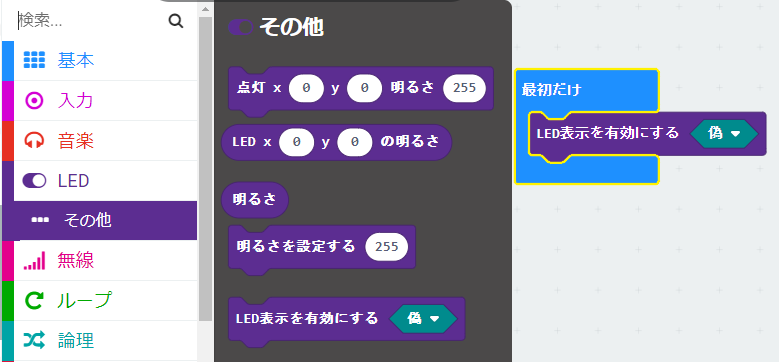
Kaga:bit-Driveのサーボモーター端子は、micro:bitのLEDと共有しているため、同時に使用することはできません。サーボモーターを利用する場合は、micro:bit側で「LEDを使用しない」設定が必要です。
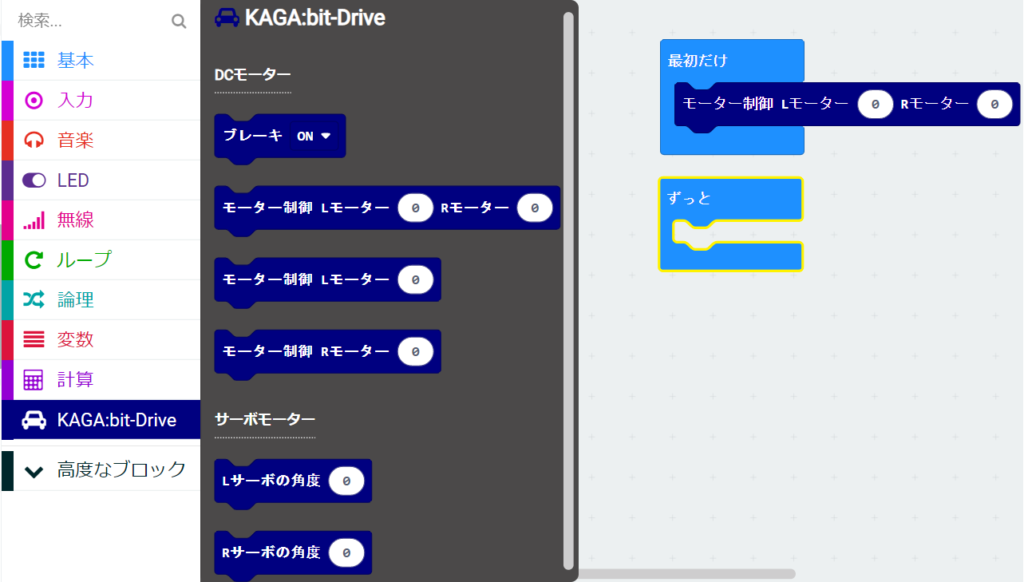
サーボモーターの制御には、micro:bitのブロックが使えるほか、Kaga:bit用のブロックを用意しています。