2023年3月23日
kagabitシリーズ

まっすぐ進まない場合(出力バランスで調整)
モーターには個体差があり、同じモーターでもスピードが違います。
そのため、左右のモーターを同じ出力にしても、まっすぐ進まない場合があります。
ライントレースのように、走りながらセンサーなどを使って修正できる場合はいいのですが、
ロボレーブのアメイジングチャレンジのように直進性が重要な場合は問題になります。
解決策のひとつとして、kagabitに搭載されているトリマを使う方法があります。
しかしレースのように激しく動く場合は、徐々にトリマがずれ誤差が発生します。
もうひとつの解決策として、左右の出力バランスで調整する方法があります。
トリマはあまり動かさず固定して、プログラムで制御します。
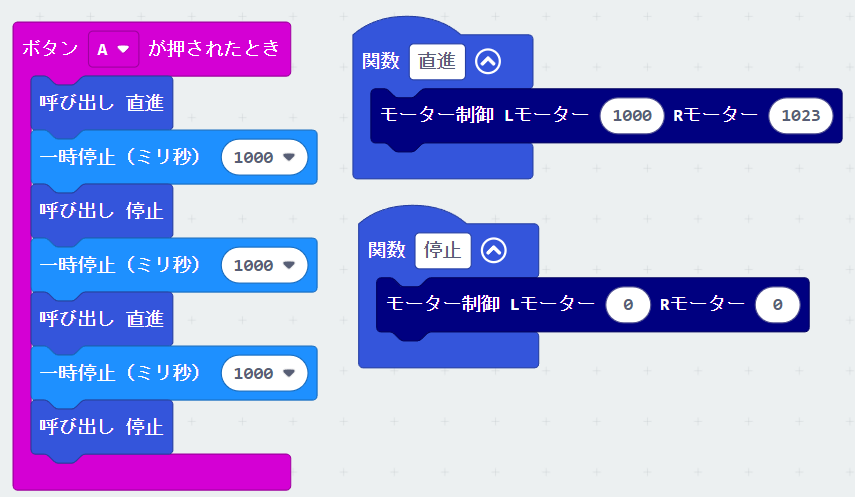
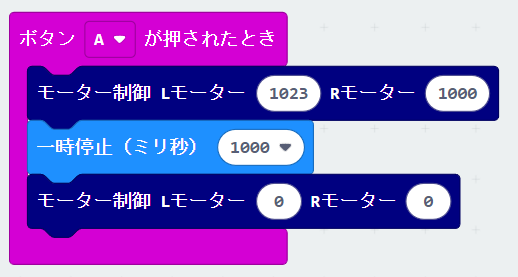
徐々に左に曲がる場合は、右モーターが強いので、出力を弱めます。
徐々に右に曲がる場合は、左モーターが強いので、出力を弱めます。
同じブロックをたくさん作らなければいけない場合は「関数」を使うと便利です。