2022年4月5日
kagabitシリーズ

マイクロスイッチの利用(バンパー)

Groveコネクタを搭載したマイクロスイッチの使い方を紹介します。小さな力で作動し、カチッと押し込まれることでデジタル(0/1)の値を取得できます。
ロボレーブ大会では以下のような使い方が想定されます。
- ラインフォロイングでHOMEに到着したことを検出する
- スモーボットで相手にぶつかったことを検出する
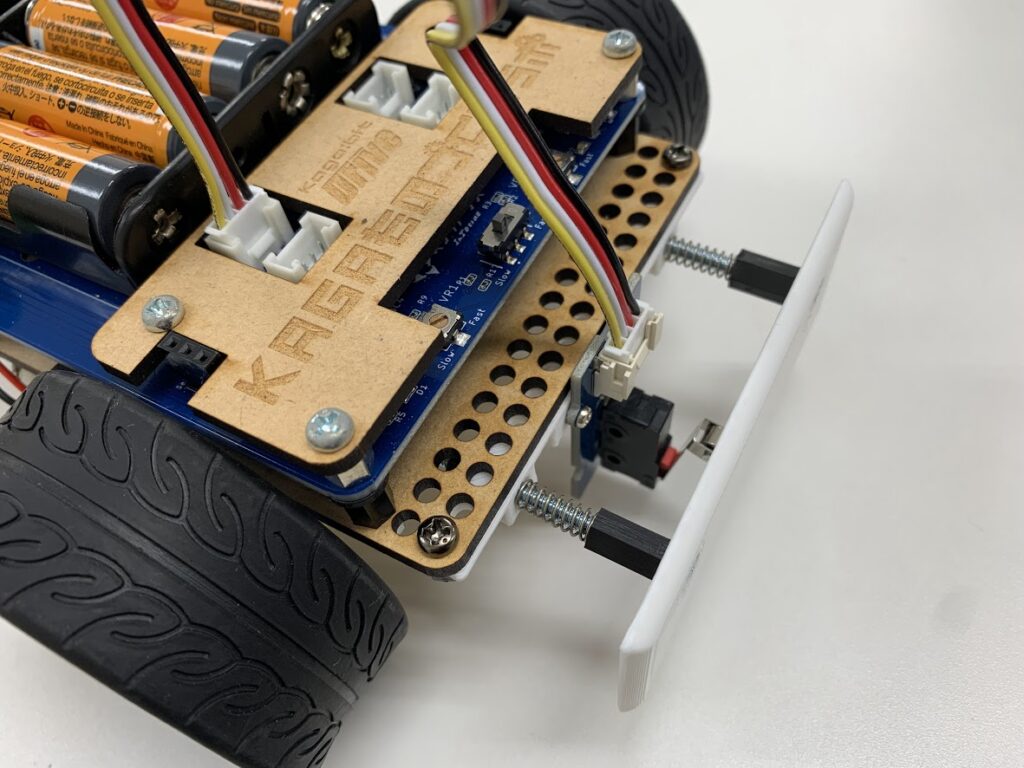
ネジなどを利用してロボットに取り付けます。
今回は3Dプリンタで製作したバンパーを使って取り付けました。必要な場合はお問い合わせください。

何もしていないときは0、
カチッと押し込んだ時は1を出力します。
プログラムでは
高度なブロック > 入出力端子 にある
デジタルで読み取る というブロックを使います。

ロボット前方にマイクロスイッチを取り付けました。
スイッチは端子P0に接続しています。
例として「前進して、ぶつかったら停止する」場合はこのようになります。