2023年3月23日
kagabitシリーズ

DCモーターのプログラムその1
Kaga:bit-DriveにはDCモーター(タイヤ)制御用のブロックを用意しています。
左モーターと右モーターの出力を-1023~1023の間で設定します。
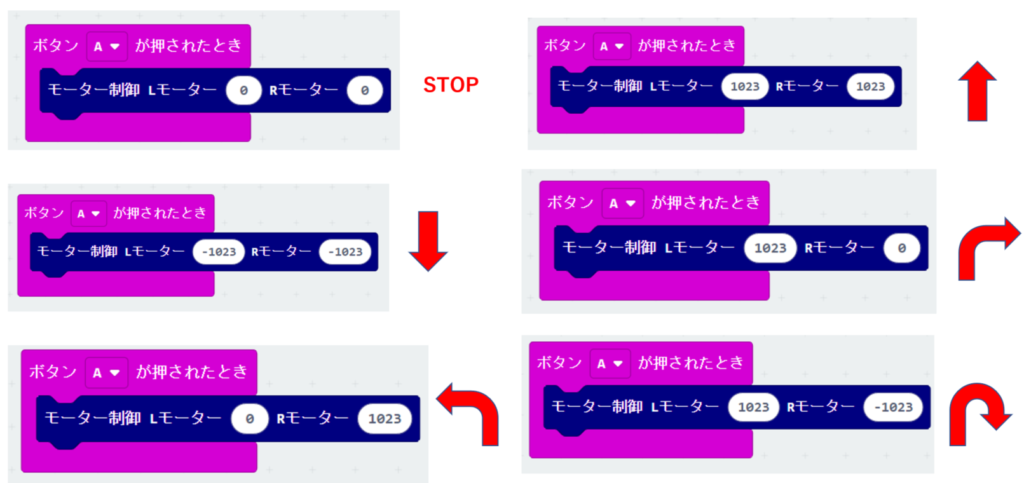
設定値とマシンの動き方の例は以下のようになります。
左右のモーターの出力を変えることで、動き方を制御します。
| Lモーター | Rモーター | 車の動き |
| 0 | 0 | 停止 |
| 1023 | 1023 | 直進 |
| -1023 | -1023 | 後退 |
| 1023 | 0 | 右回転 |
| 0 | 1023 | 左回転 |
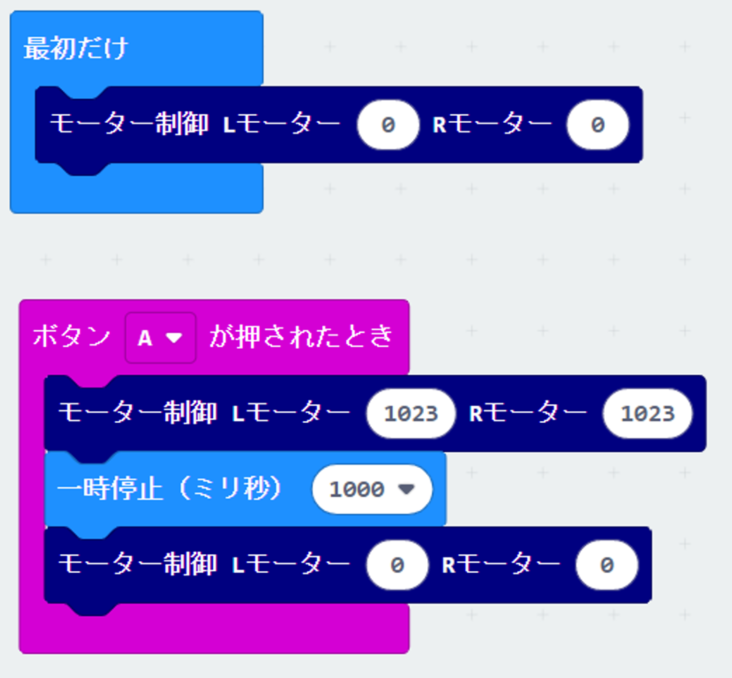
モーター制御ブロックと「一時停止」を組み合わせて動きを作ります。
・最初だけ「停止」
電源投入時にいきなりモーターが動くことがあるので、最初は停止から始めます。
・ボタンAが押されたとき
直進(1秒)の後に停止
モーター制御ブロックと一時停止を組み合わせて使うのが基本です。