2023年3月23日
kagabitシリーズ

DCモーターのプログラムその2
「モーター制御」のブロックと「一時停止」のブロックを組み合わせて、マシンを制御します。
設定値とマシンの動き方は以下のサンプルもご覧ください。
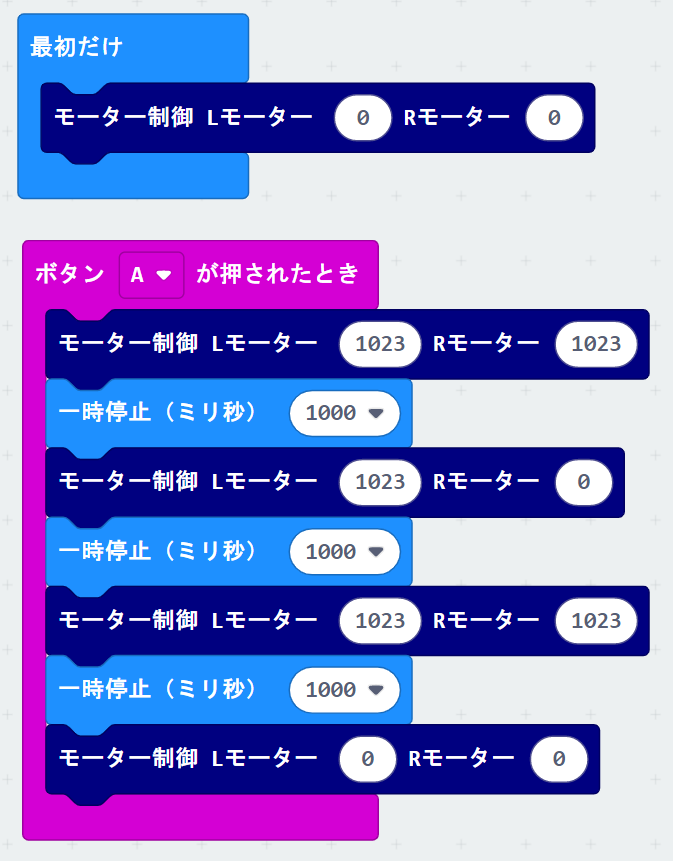
直進した後に右折するプログラムはこのようになります。
最初だけ(電源投入時)
・停止
ボタンAが押されたとき
・直進(1秒)
・右折(1秒)
・直進(1秒)
・停止
※路面の状態によって変わります
※Slow、Fastの設定によって変わります。
RoboRave大会で実施される「アメイジング」はこのように「モーター制御」と「一時停止」の組み合わせで行います。