2023年3月23日
kagabitシリーズ

ライントレースのプログラムその3
ラインセンサーを2つ使ったライントレースについてご紹介します。
ラインセンサーをふたつ使ったライントレースについてご紹介します。センサーをふたつ使う場合は黒線をまたぐように配置します。
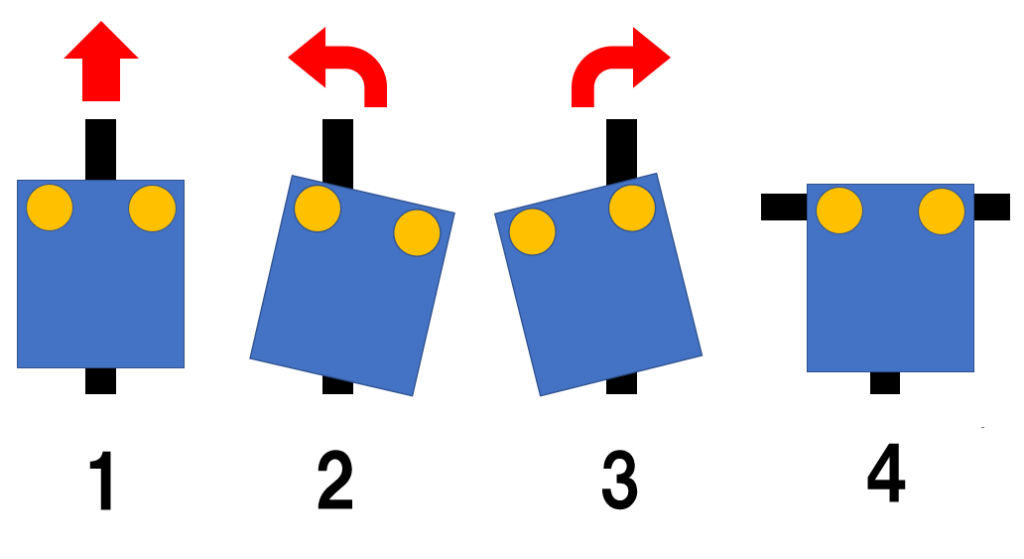
センサーの反応には4パターン考えられます。
- 両方白
- 左センサーが黒、右センサーが白
- 左センサーが白、右センサーが黒
- 両方黒
- 両方白の場合は、ちょうど黒線をまたいでいる状態なので直進します。
- 左が黒、右が白の場合は、左カーブをして両方白の状態に戻します。
- 左が白、右が黒の場合は、右カーブをして両方白の状態に戻します。
- 両方黒の場合は、終端やT字路にぶつかった場合なので、適宜動きを決めます。
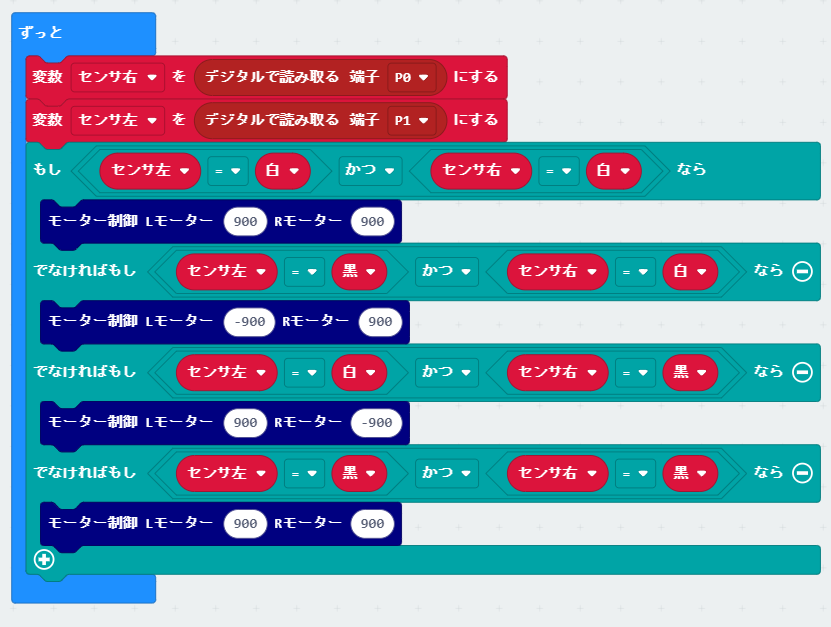
プログラム例はこのようになります。
センサの値はわかりやすくするために変数化しました。
出力が強すぎると曲がり切れない場合があります。またセンサーの間隔が広すぎたり、狭すぎたりしてもコースアウトの原因となりますので、コースに合わせた間隔にする必要があります。